Robotic Navigation Using SLAM and ROS
This project focuses on autonomous robotic navigation using SLAM (Simultaneous Localization and Mapping) integrated with the Robot Operating System (ROS). It enables mobile robots to explore unknown environments while building accurate maps and localizing themselves in real time. By combining mapping, localization, and navigation, the system provides the foundation for autonomous robots that can adapt to complex, dynamic spaces.
“The system is modular and scalable, with the potential to extend to 3D SLAM, multi-robot navigation, and outdoor mapping using GPS and vision-based SLAM techniques. This flexibility allows for expansion into fields ranging from warehouse automation to self-driving vehicles.”

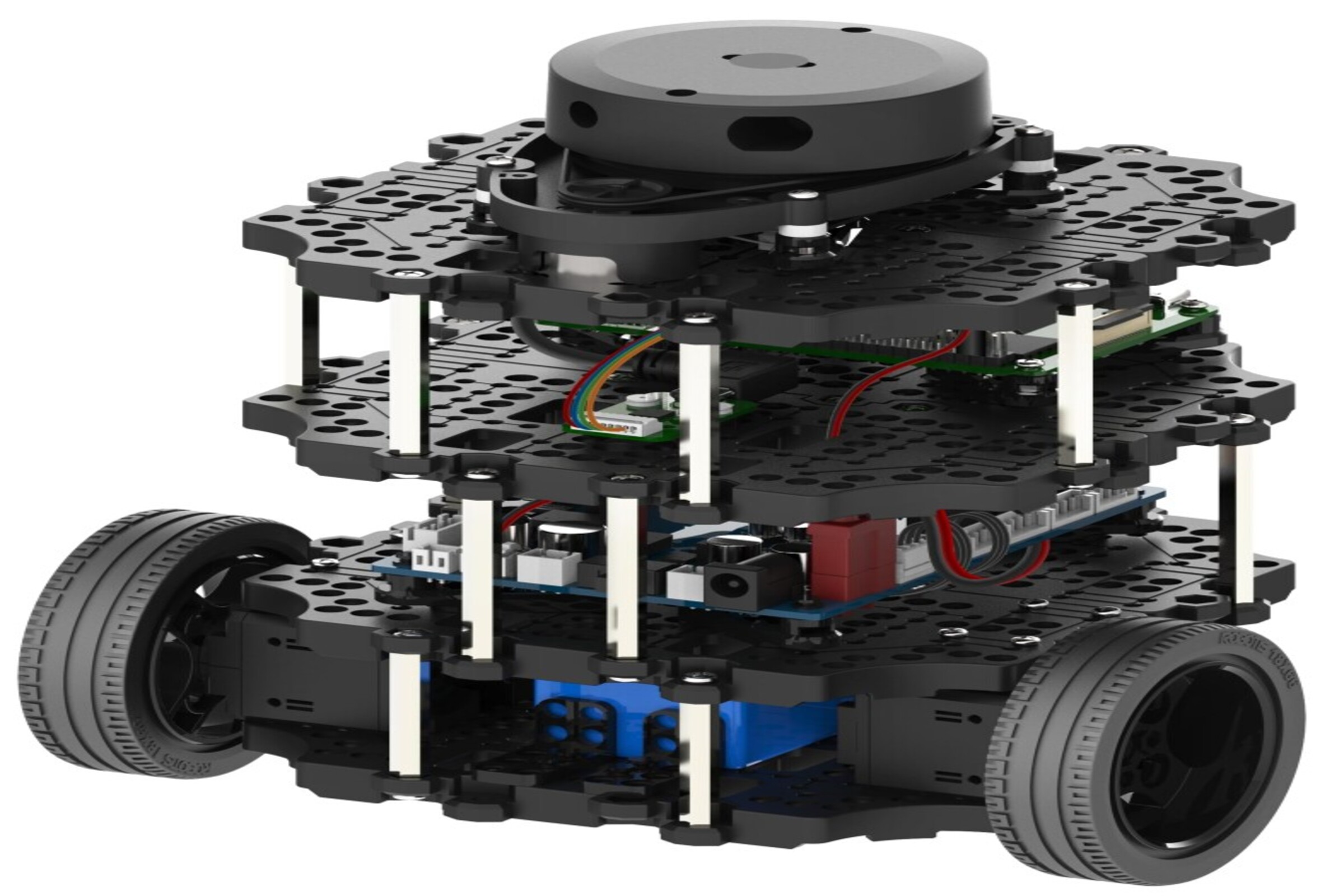
The system implements SLAM algorithms such as Gmapping or Cartographer within a ROS framework. Sensor data from LiDAR, IMU, and wheel encoders are fused to estimate the robot’s position and generate a real-time map of the environment. The ROS navigation stack is then employed for path planning, obstacle avoidance, and adaptive movement. With these capabilities, the robot can autonomously move through indoor environments, avoid dynamic obstacles, and continuously update its map as new information is detected. This solution is highly relevant for service robotics, industrial automation, and research, as it offers a reliable platform for testing and deploying autonomous navigation.